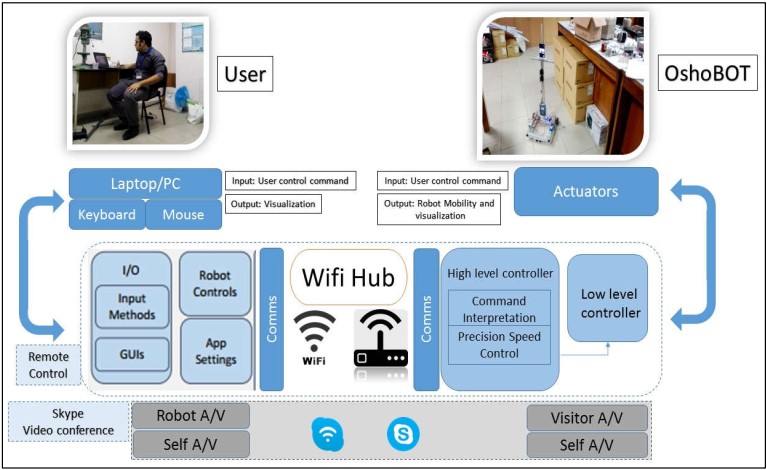
This project presents an FPGA based telepresence robot named “OshoBOT” intended for serving as assistant in various application field which might include healthcare, elder and children care at home, office personal assistance, education and so on. OshoBOT uses an android tablet or smartphone as telepresenter and uses its camera for vision-based remote control. The FPGA based solution has been developed using myRIO of National Instrument. Project work primarily includes the CAD design, model simulation, mechanical construction of the robot and setting up the remote-control network server. Oshobot has been tested and calibrated based upon the mechatronic control system derived
mathematically. The drive correction factor has been maintained for efficient drive system.
Resources used:
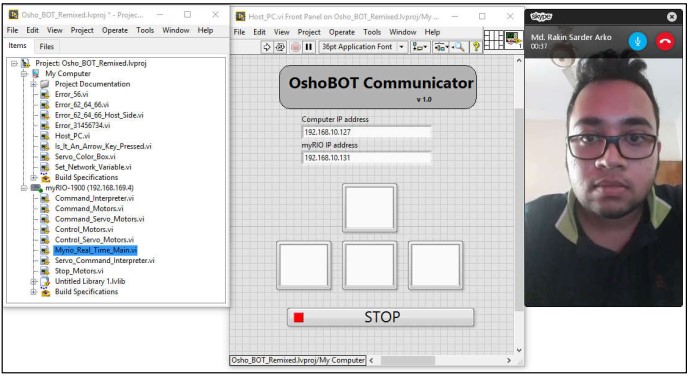
- myRIO FPGA real-time embedded evaluation board
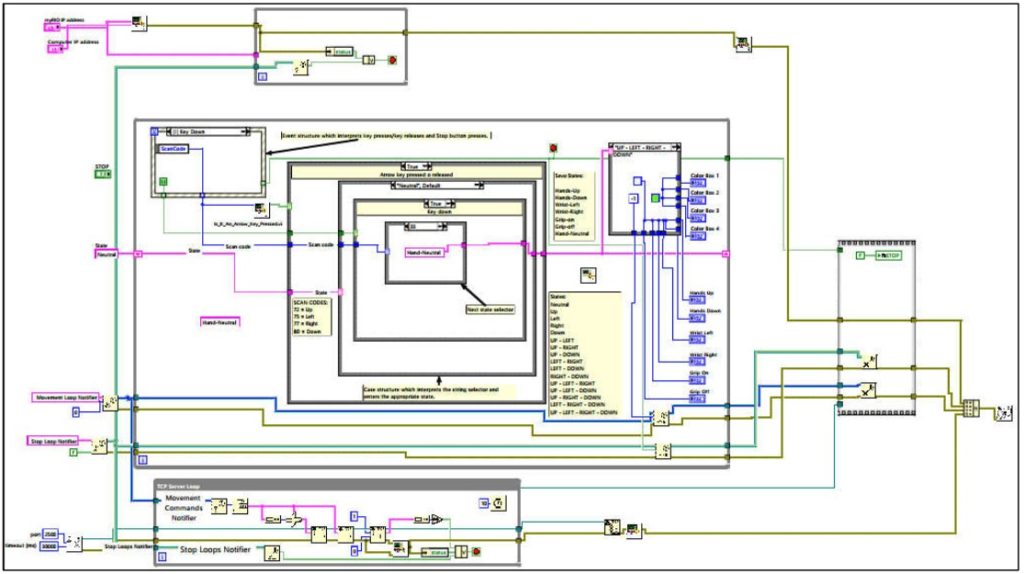
- LabVIEW 2016
- MATLAB
- Skype